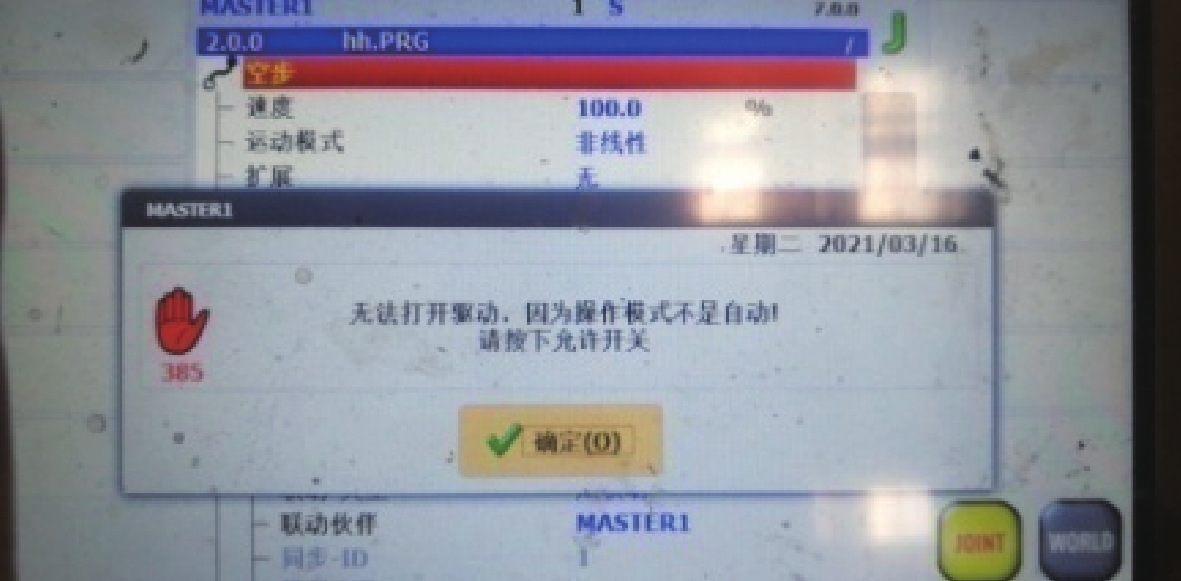
图 1 代码为“385”的报警

当前机器人已广泛应用于各行各业,机器人的应用不仅能够降低相关人员的劳动强度和工作量,而且其在连续工作时长、工作精度和工作效率等方面都远优于人工作业[1],在工业机器人的应用中,焊接机器人的数量所占比重达50%以上[2]。但由于机器人的技术含量高,一旦发生故障,一般情况下机器人操作人员或设备维修员不易排查出问题,只有专业的人员才能发现并排除故障,给后续的应用和维护带来了困难。本文就IGM机器人的一种驱动问题进行了诊断和分析。
该设备名称为U肋焊接机器人,设备上采用了两组IGM机器人系统,每组IGM机器人系统包含两台IGM的机械手。
U肋焊接机器人主要满足桥梁U肋板单元构件的焊接,同时也能够满足桥梁隔板单元、钢桁梁箱式杆件和工型杆件焊接。设备的主要结构由机器人本体及控制系统、机器人外部轴行走机构、反变形翻转胎架及夹具、焊接电源、其他辅助装置等组成。行走机构采用悬臂行走机构,纵向行走时两台悬臂行走机构能独立控制,互不干扰。每台机构上设置两个焊接机器人,焊接机器人之间具有通信功能,可以相互协调与修正。为提高焊接效率,反变形翻转胎架采用双工位布置。焊接系统具有焊丝接触传感和电弧跟踪能力,焊缝质量稳定。
U肋焊接机器人可焊接最大工件规格为:长度16 m;宽度4.5 m;高度0.33 m;质量:30000 kg。
U肋焊接机器人的机器人本体采用IGM公司的RTE 486S-6轴焊接机器人。该系列机器人采用K6编程示教器和离线教学系统的出色编程技术[3];由于采用了最佳的轴向几何形状和焊枪在腕轴上的固定,实现了空心轴,因此工作区域大,焊缝位置焊接优秀,所有电缆均使用空心轴位于机器人手臂内;高动态,免维护的交流伺服电机和刚性铸铝联合结构的突出特点保证了所有轴的高转速和快速加速,驱动力通过免维护的Cyclo变速箱传递;电机配备抱闸,关闭机器人后无需校准等优点。
RTE 486S机器人采用的是RCE控制系统,是一种全数字控制系统,整个控制系统只涉及数字信号处理器,没有任何模拟电子元件,控制系统所有的部件均由数字总线系统连接。全数字机器人控制系统使得机器人受环境影响的概率降到最低,机器人响应速度得到高,响应时间大大缩短。
在U肋焊接机器人的某次正常开机过程中,设备上的其中一组IGM机器人控制系统发出报警,示教器显示报警代码“385”,内容为“无法打开驱动,因为操作模式不是自动!请按下允许开关”的报警,如图1所示。
尝试通过各种方式打开驱动,但均以失败告终。对机器人控制柜进行检查,但未发现任何电气元件有明显的故障或报警显示。
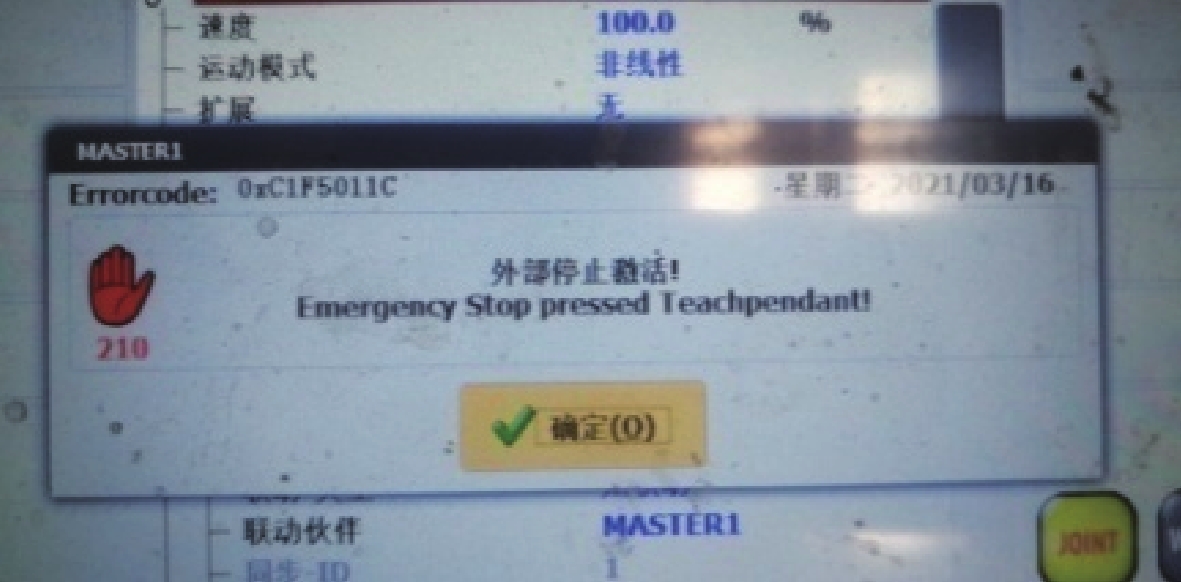
之后对U肋焊接机器人进行重启操作,发现故障的机器人开机后最先出现报警代码为“210”,内容为“外部停止激活!”的报警,如图2所示。
对机器人外部的各急停按钮等相关信号源进行检查,各信号源处于正常工作状态,且均未激活外部停止信号。
经过对上述两个问题的分析,得出了两个问题的关联:“外部停止激活”导致了机器人“无法打开驱动”,因此决定首先解决“外部停止激活!”这一问题。
在确定了初步方向后,决定再次对设备的各急停按钮、联动开关、限位开关等相关信号源逐一进行排查,排除了外部相关信号源故障的可能性。
之后,通过查阅IGM相关技术资料以及咨询IGM工程师后得知出现“外部停止激活!”报警的原因众多,并不一定由外部产生,也有可能是机器人控制柜内的某一控制元件故障。因此,将故障点锁定在了机器人的电气控制柜内部。
由于报警是“外部停止激活!”,因此首先将排查重点放在了机器人控制柜内的各类数字量模块、继电器模块等电气元件。通过翻阅机器人控制柜的电气原理图,以及查阅相关的技术资料,最终将范围缩小为PilzPNOZ安全继电器及BECKHOFF I/O模块等相关模块。
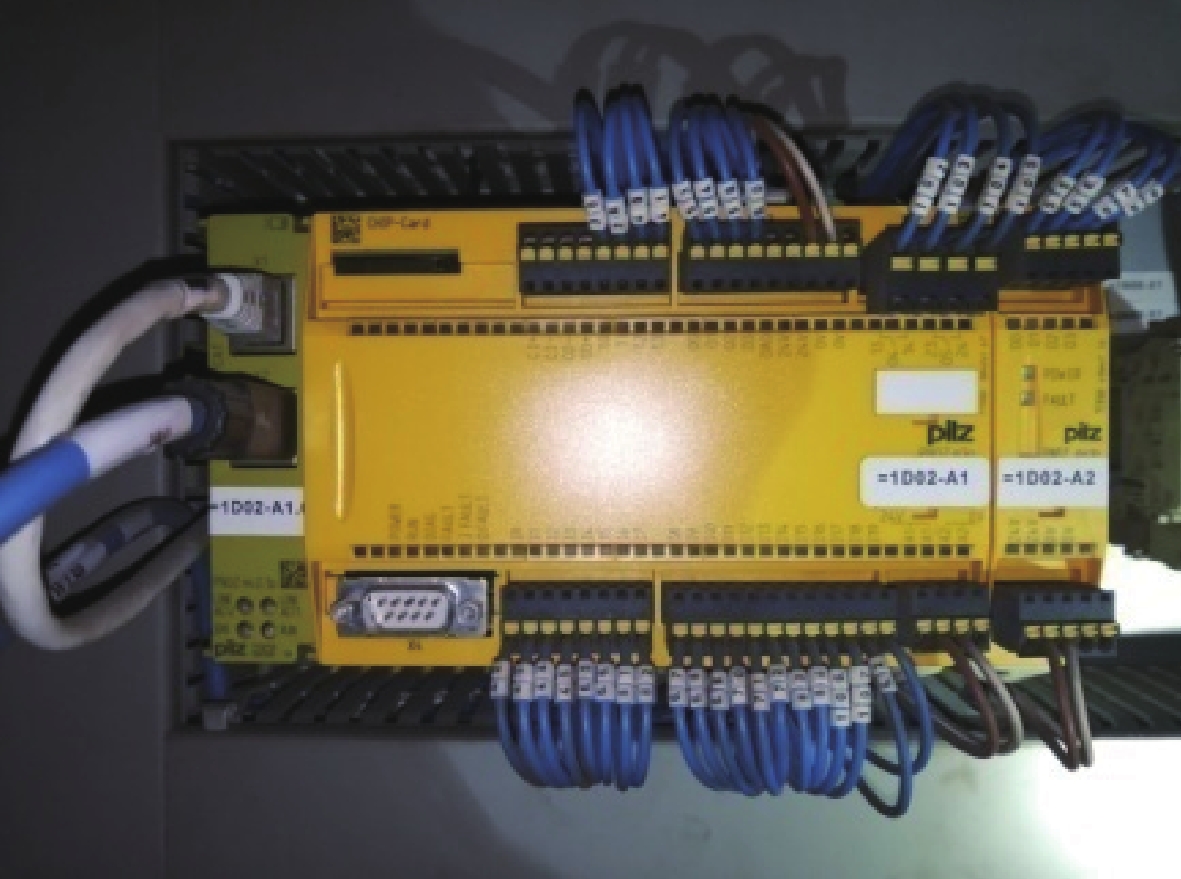
虽然之前对控制柜内各电气元件经过了简单的检查,未发现有明显的故障或报警,但在缩小范围后经过细致的检查,发现PilzPNOZ安全继电器上的PilzPNOZ mc21p模块的RUN灯未亮,PilzPNOZ安全继电器实物如图3所示。
根据经验来说这明显是不正常的,经过与另一台一模一样的设备在同等状态下对比,确定了这一不正常项。起初认为是Pilz模块故障或损坏,但通过与另一台设备置换Pilz模块后发现并非是该模块的问题(经过相关技术方面的确认,现场使用的两组IGM机器人系统除个别具有程序的控制器外,其余电气元件可进行调换)。在对Pilz深入了解后发现PilzPNOZ mc21p属于通信模块,且其LINK ACT1和LINK ACT2状态灯也属于熄灭状态,再结合以往的故障排查经验,综合考虑是PilzPNOZ mc21p模块所在的通讯线路中的前端的元件存在问题。在查看控制柜的电气原理图后,经过初步的分析和筛选,最终初步确定了疑似的故障线路,其示意图如图4所示。
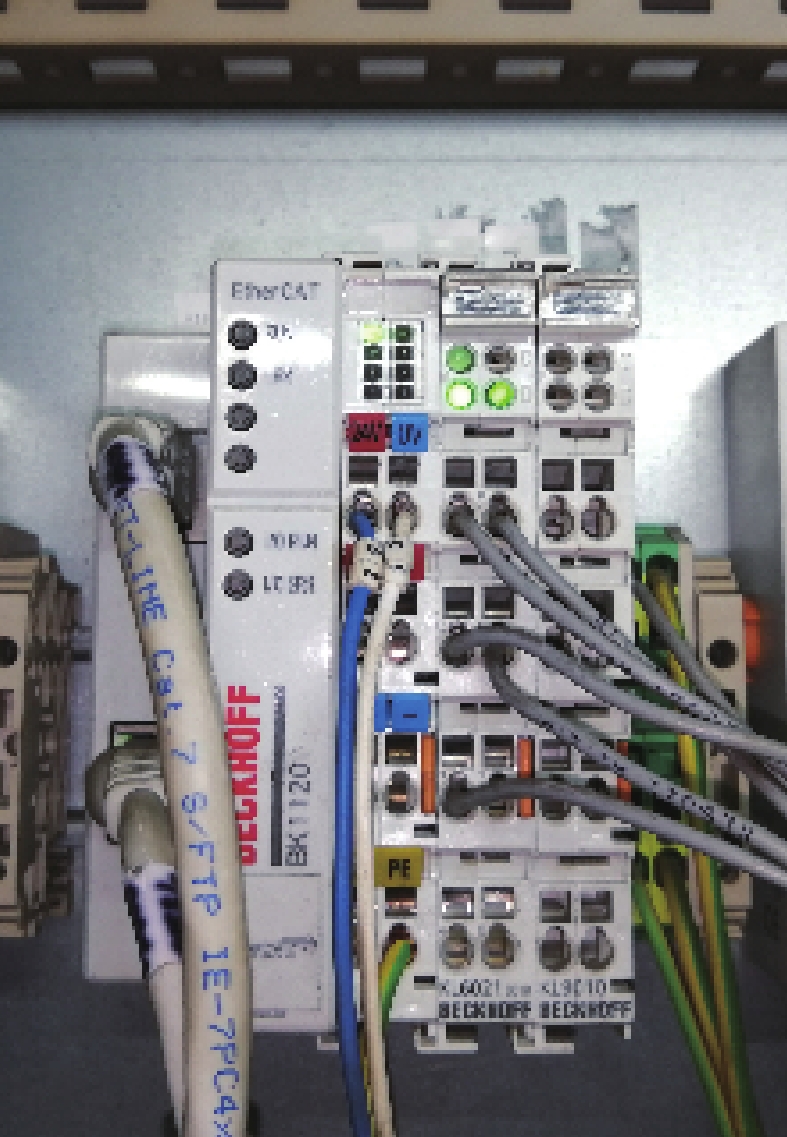
在按照电气原理图进行检查后发现Pilz模块前端的一个BECKHOFF BK1120模块中的RUN灯、I/O RUN灯均为熄灭状态,其状态如图5所示。
因此考虑可能是该模块损坏或通讯以太网线断开。先通过更换以太网线,排除了通讯线路断开的可能,之后通过调换BECKHOFF BK1120模块后也排除了其损坏的可能。
之后的故障排查一方面可能是BECKHOFF BK1120模组的连接元件出现问题,经过相关的技术研究发现其模组中的KL6021模块负责与焊机的通讯交互;另一方面故障发生点可能还在BECKHOFF BK1120模组的前端。
在与IGM的资深工程师的交流后,决定将BECKHOFF BK1120模组跳过,直接将其通讯的前端元件与后端元件进行对接测试该模组及其关联设备元件是否正常。同时,在机器人示教器端查看设备内各路通讯的状况。
通过跳接测试及查看设备各路通讯状态后确定了问题点发生在正在排查的这条通讯线路上,并且确定了问题并非发生在BECKHOFF BK1120模组及其关联设备元件上,因为经过测试后故障仍然存在,由此能够肯定的是问题点还在BECKHOFF BK1120模组的前端。
在沿着BECKHOFF BK1120模组的前端线路仔细的排查后发现该条通讯线路最前端的一条支线存在异常,即一台KEBA控制器与BECKHOFF BK1110模块的通讯存在问题,其现象为EtherCAT通讯口指示灯绿灯常亮,在正常的通讯状态下,其指示灯应为绿灯闪烁,这种现象并不常见,因此在故障排查的时候很容易被忽视掉。
通常来说出现通讯问题一般是由以下几点导致的:
(1)通讯线路断开:通讯线路的排查,即更换以太网线路,从而排除了通讯线路的问题。
(2)通讯线路前后端硬件故障:在硬件排查的一开始,将目标放在了前端的KEBA控制器上,经过了解,确认了调换KEBA控制器的可行性,但前提是要取出程序卡后再进行更换。在调换KEBA控制器后排除了KEBA控制器损坏的可能性。接着将目光转移到了后端的BECKHOFF BK1110模组上,按照常规思路对BECKHOFF BK1110模块进行了调换,但发现依然不是BECKHOFF BK1110模块的问题。
(3)软件问题:由于现场条件有限,而且相关程序具有一定的保密性,因此无法对程序进行检查,相关故障的排查陷入了死胡同。
但凭借着相关经验,考虑软件出现问题的概率是极低的,于是与IGM资深工程师进行了深入的咨询和了解,得知通讯后端BECKHOFF BK1110模组中的任意一个模块故障均会导致该通讯线路异常。
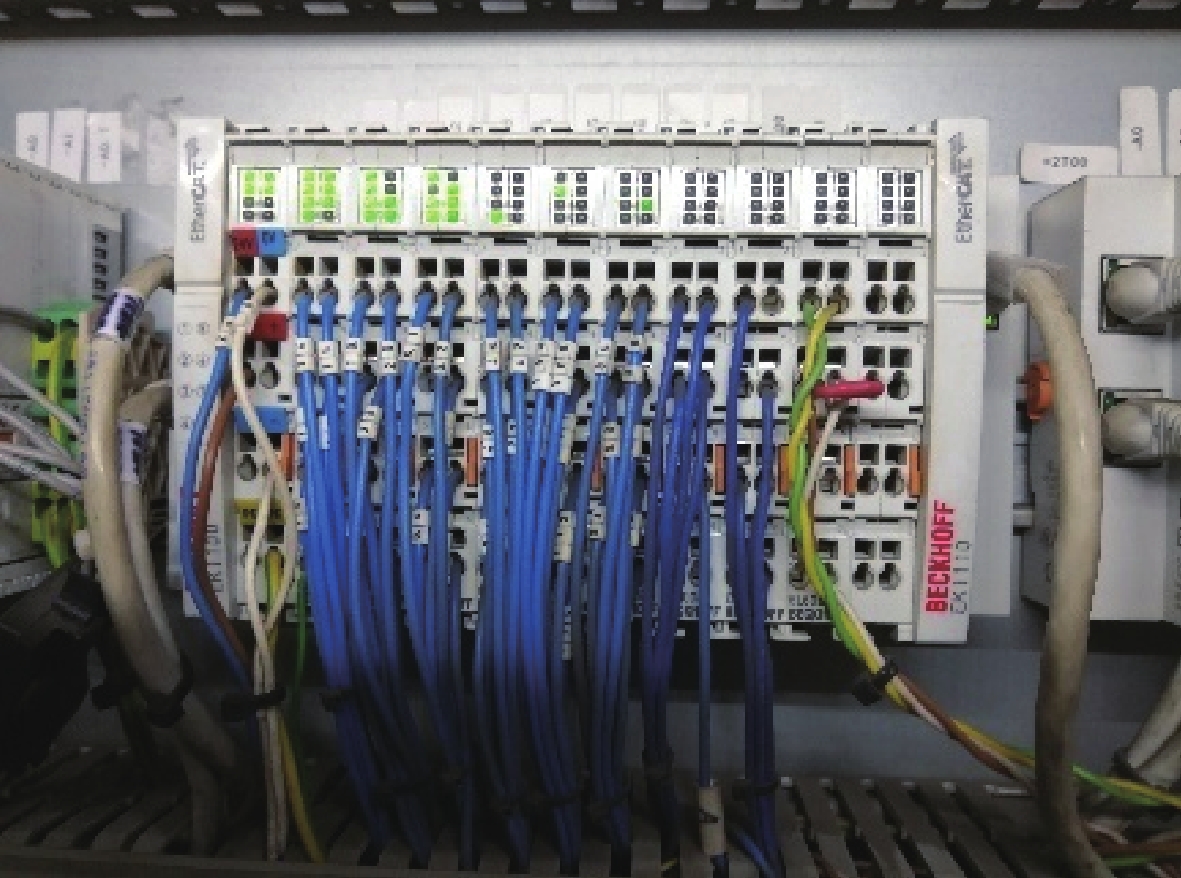
考虑到BECKHOFF BK1110模组上线路较多,直接调换的话工作量较多,于是将该模组的工作状态(状态指示灯)与另一台正常设备进行比较,最终排查出BECKHOFF BK1110模组中的一个BECKHOFF EL6021模块存在异常。BECKHOFF BK1110模组如图6所示。
在将该模块进行调换后,设备正常运转,最终确定了设备故障的最终原因是BECKHOFF BK1110模组中的一个BECKHOFF EL6021模块故障。
在确定故障点后,联系设备厂家购买BECKHOFF EL6021模块并进行更换。但正常情况下的模块是不会无缘无故损坏的,除非该模块质量不合格。于是对原BECKHOFF EL6021模块进行拆卸,发现其内部存在短路现象。分析短路原因可能是由于现场电气控制柜密封不严导致焊接金属烟尘进入控制柜,再加上控制柜内清扫不及时,使得细小的金属粉尘进入模块内部,最终导致模块内部电气元件短路损坏。
为了降低类似情况的发生,立即对设备的电气控制柜进行了整改,并定期进行清扫。
外部安全装置、急停按钮的触发到控制柜内部电气元件甚至是软件程序有可能会引起外部停止信号被激活,从而导致驱动无法打开,一般情况下成熟设备的软件程序出现问题的概率极低,绝大多数情况都是硬件的问题。在排查故障的过程中虽然耗费了大量的时间,但是使相关的技术人员对设备的了解更上一层楼,以后遇到类似的问题也会更加得心应手加以解决。
来源:金属世界 上海国检浦东检测技术有限公司 版权所有 【沪ICP备2022009160号】 百度统计
全国统一服务热线:19957375031
客服手机号:19957375031
电话:021-33362018 质量投诉 +86-573-86161208
邮箱:shhgj@chinazbj.com
地址:上海市闵行区莘建东路58弄2号502室
备案号:沪ICP备2022009160号
技术支持:追马网